前情提要
最近其實處於多開戰線的狀態:
- Homelab
- Docker Swarm 到 K8s 的遷移,相關文章見:
- 老舊筆電整備
- ASUS X55C 和 Sony VAIO VGN-SR56TG/B,尚無公開文章
- 整理一下自己 AI 專案的思緒與結構
- 學習 Carla, OpenDrive...等自駕車之至
- Typescript AST
- RAG Side Project
Homelab 遷移大致完成,目前只剩下一個服務,想說該回來灌溉一下 RAG 專案了。
TiddlyRAG
關於目前整個生態系的亂象,我在之前的文章已經全部噴過一遍了,接下來就是採取一些行動了,關於這個專案的細節請見:
TiddlyRAG 計畫
細節我就不贅述,簡單來說就是我發現 TiddlyWiki 本身自帶 Chunk 、 Graph 、人類可讀可編輯和可攜性...等特性,在 LLM 時代應該是一個很好用的軟體,這也不是什麼新點子,想法去年 (2025) 十月就有了:
一種人類友善 llms.txt 構想
上面很多 Side Project 寫了一堆 TiddlyWiki 其實和 TiddlyRAG 是相關的,除了實驗一些 DDD 流程以外,也算是準備一些資料方便日後做 RAG 的測試。
嵌入伺服器與選擇
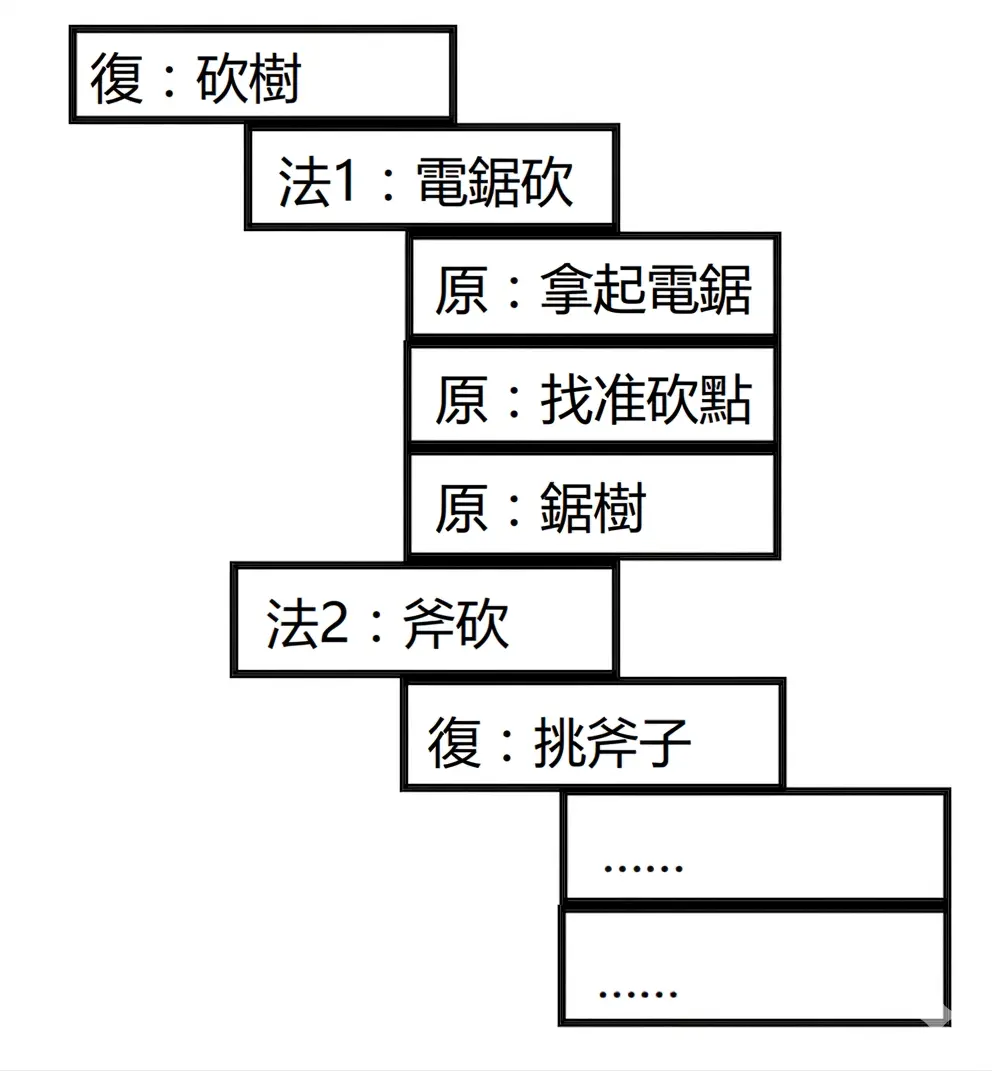
TiddlyRAG 的 POC 架構如下:
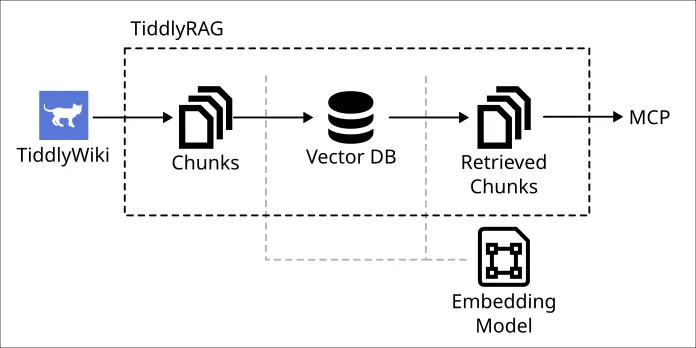
可以說有三個大題目:
- 向量資料庫 (Vector database)
- MCP (Model Context Protocol)
- 資料嵌入 (Embedding)
向量資料庫之前工作寫小工具有接觸過了,MCP 的部份也稍微查過資料,剩下比較陌生的是資料嵌入的部份。
開放權重、OpenAI API 兼容、OCI (Open Container Initiative) 佈署、nvidia 解偶,這幾個算是我對於嵌入方案的基本要求。
首先是大名鼎鼎的 Ollama,不過很快我就發現幾個問題:
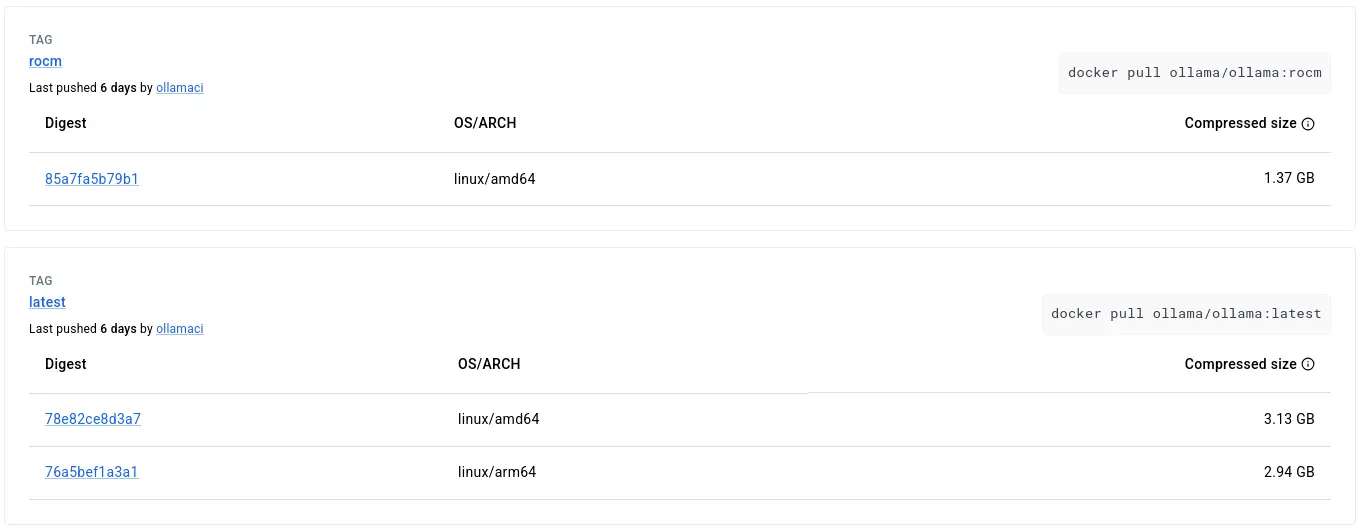
- 它的映像檔過於肥大,單層超過 1GB 的映像檔在我的可憐網路下是拉不下來的。
- 它只支援 nvidia 的 CUDA 和 AMD 的 ROCm,不夠通用。
- 就算只使用 CPU 模式,映像檔是跟 nvidia 函式庫綁定的。
好吧,下一個看看以「性能優雅」出名的 llama.cpp。
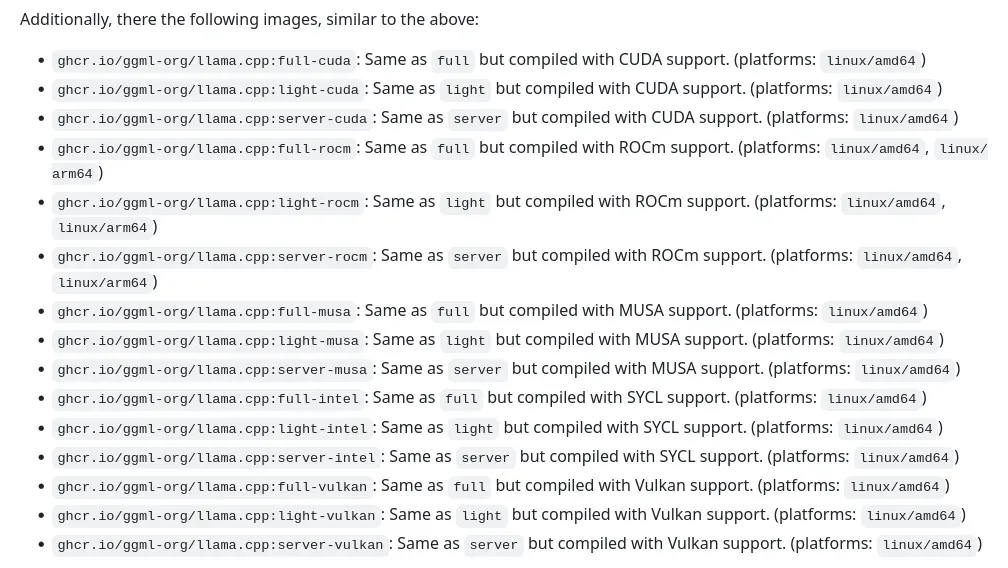

斯巴拉西!

映像檔案小、支援多種 GPU 後端,看來就決定是你了!
llama.cpp
下載了 Ubuntu x64 (Vulkan),
./llama-server \
--hf-repo Qwen/Qwen3-Embedding-8B-GGUF \
--hf-file Qwen3-Embedding-8B-Q6_K.gguf \
--embeddings --pooling mean \
-c 4096 -ub 4096 -ngl 999 --no-mmap -fa on --no-webui
指令是參考別人的1,模型會下載到 ~/.cache/llama.cpp/,不知道能不能改路徑。
接著用 Typescript 戳一下:
const url = "http://localhost:8080/v1/embeddings"
const headers = {
"Authorization": `Bearer ANY`,
"Content-Type": "application/json"
}
const payload = {
"model": "ANY",
"input": "Your text string goes here",
"encoding_format": "float"
}
const response = await fetch(url, {
method: "POST",
headers,
body: JSON.stringify(payload),
});
const result = await response.json()
console.log(JSON.stringify(result, undefined, 2));
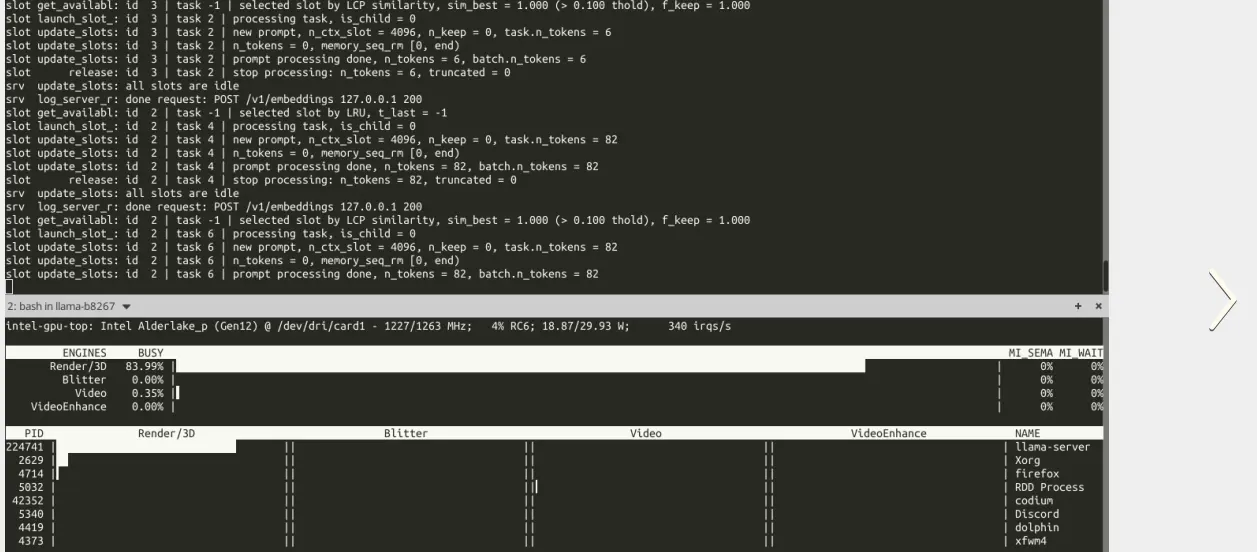
GPU 有在運作,不錯不錯。
模型下載的一些問題
本來想說 llama.cpp 是精簡出名的,根據職責分離原則它可能不會實做下載的部份,所以先試著用 Huggingface 的 CLI 跑跑看了,
hf download \
--local-dir models \
Qwen/Qwen3-Embedding-8B-GGUF \
Qwen3-Embedding-8B-Q6_K.gguf \
不過還蠻不穩定的,不知道為什麼。
也有試過另外一個 llama.cpp 的指令:
./llama-server \
-hf Qwen/Qwen3-Embedding-8B-GGUF:Q6_K \
--embeddings --pooling mean \
-c 4096 -ub 4096 -ngl 999 --no-mmap -fa on --no-webui
load_backend: loaded RPC backend from /home/not-important/llama-b8267/libggml-rpc.so
ggml_vulkan: Found 1 Vulkan devices:
ggml_vulkan: 0 = Intel(R) Iris(R) Xe Graphics (RPL-P) (Intel open-source Mesa driver) | uma: 1 | fp16: 1 | bf16: 0 | warp size: 32 | shared memory: 65536 | int dot: 1 | matrix cores: none
load_backend: loaded Vulkan backend from /home/not-important/llama-b8267/libggml-vulkan.so
load_backend: loaded CPU backend from /home/not-important/llama-b8267/libggml-cpu-alderlake.so
common_download_file_single_online: no previous model file found /home/not-important/.cache/llama.cpp/Qwen_Qwen3-Embedding-8B-GGUF_preset.ini
common_download_file_single_online: HEAD failed, status: 404
no remote preset found, skipping
error from HF API (http://huggingface.mirrors.solid.arachne/v2/Qwen/Qwen3-Embedding-8B-GGUF/manifests/Q6_K), response code: 404, data: {"error":"Sorry, we can't find the page you are looking for."}
大概是因為 Olah 不支援 v2 API 吧。
我在 LAN 的模型快取策略是由 Homelab 處理,HF 原本用本地資料夾的「快取」我並不在乎。
GGUF
在上述範例中,我們看到了 Qwen3-Embedding-8B-Q6_K.gguf 這樣的檔案,它是什麼意思?
Qwen3-Embedding-8B 自然是模型本身的名稱以及它的參數量,.gguf 則是一種能夠儲存模型權重的檔案,並且 GGUF 是 GGML 的後繼者。
GGML 這個格式則是從 GGML (Georgi Gerganov Machine Learning Tensor library) 這個函式庫而來的,Georgi Gerganov 則是作者的名字。
GGUF 比較正確的全名其實是 "GGML Unified Format",關於它的名稱這��裡有一篇文章在討論它:
What does GGUF stand for? A "Guide" : r/LocalLLaMA
Q6_K 則是量化參數,量化是一種用更小的資料型態來儲存模型權重的技術,可以減少模型儲存的大小與推論時需要的記憶體數量。Q6 代表模型主要使用 6bit 的資料來儲存權重,後面的數字或編號代表各種不同的混合量化策略,具體差異對於調用者而言不是特別重要,重要的是量化同時也會造成模型性能下降:

Perplexity 是一種相對指標,簡單來說準備一個資料集(例如維基百科),給定一些文字,讓模型預測下一個詞,並紀錄不正確性。我們可以看到 Q2_K 量化的 65B 模型退化到接近 30B 未量化模型的水準。
圖表來自 llama.cpp 的 GitHub,它使用了 Q2_K, Q3_K_S, Q3_K_M, Q3_K_L, Q4_K_S, Q4_K_M, Q5_K_S, Q5_K_M, Q6_K 這幾種量化參數並與 F16 進行比較,完整報告請見:
k-quants by ikawrakow · Pull Request #1684 · ggml-org/llama.cpp
這就是為什麼我選擇 Q6_K 量化的嵌入模型測試,因為它顯著的降低記憶體但是性能可能不會太顯著的下降。
Perplexity 是相對指標,Perplexity 指標沒有顯著下降不代表模型的其他性能沒有明顯下降。